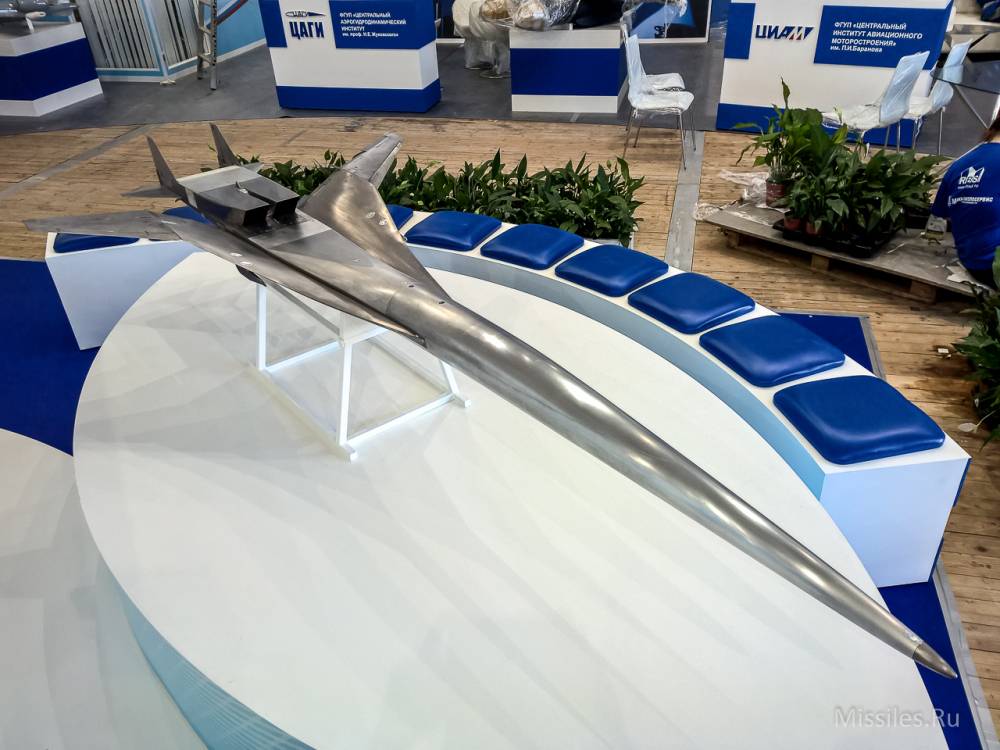
Vehicul aerian hipersonic multimodal fără pilot Molot

În prezent, NPO Molniya OJSC dezvoltă un vehicul aerian hipersonic fără pilot cu mai multe moduri pe tema muncii de cercetare Molot. Acest UAV este considerat un prototip-demonstrator de tehnologii pentru o aeronavă hipersonică fără pilot cu accelerație cu un sistem de propulsie cu ecran combinat turbo-ramjet. Tehnologia cheie a prototipului este utilizarea unui motor ramjet (ramjet) cu o cameră de combustie subsonică și un dispozitiv de admisie a aerului cu ecran.
Calcul și parametrii experimentali ai prototipului demonstrator:
- numere Mach de croazieră M = 1.8… 4
- altitudini de zbor de la joasă la H = 20 m,
- greutate de zbor de până la 530 kg.
- lansare la sol din lansator, folosind un propulsor de propulsor solid.

Preistoria acestei cercetări a fost proiectul unui vehicul aerian supersonic fără pilot (MSUA) multi-modal dezvoltat de OAO NPO Molniya, care a determinat aspectul aerodinamic al unei aeronave promițătoare cu accelerație fără pilot sau cu echipaj. Tehnologia cheie a MUAV este utilizarea unui motor ramjet (ramjet) cu o cameră de combustie subsonică și un dispozitiv de admisie a aerului cu ecran. Parametrii de proiectare ai MSUA sunt: numere Mach de croazieră M = 1.8… 4, altitudini de zbor de la joasă până la H ≈ 20 m, greutatea de lansare de până la 000 kg.
Dispunerea admisiei de aer studiată la standul TsAGI SVS-2 a arătat o eficiență scăzută a ecranului de pană ventral aplicat, realizat „în același timp” cu fuselajul (Fig. A) și un ecran dreptunghiular cu o deschidere egală cu lățimea fuselajului ( Fig. B).

Ambele au furnizat o constantă aproximativă a coeficienților de recuperare a presiunii totale ν și a debitului f de-a lungul unghiului de atac în loc să le crească.
Deoarece ecranul frontal de tipul utilizat pe racheta Kh-90 nu era potrivit pentru MUA ca prototip al unui avion cu accelerație, s-a decis, pe baza studiilor experimentale TsAGI de la începutul anilor 80, să se dezvolte un ecran ventral, păstrând configuraţia cu un corp central în două trepte obţinut conform rezultatelor testelor.
Pe parcursul a două etape de studii experimentale la un stand special SVS-2 al TsAGI, decembrie 2008 - februarie 2009 și martie 2010, cu o etapă intermediară de studii exploratorii numerice, a fost dezvoltat un dispozitiv de admisie a aerului cu ecran (EVZU) cu două -corp conic de etapă având numere de proiectare diferite trepte Mach, ceea ce a făcut posibilă obținerea unei tracțiuni acceptabile într-o gamă largă de numere Mach.

Efectul de ecran este de a crește fluxul și coeficienții de recuperare cu o creștere a unghiului de atac la numerele Mach M >2.5. Mărimea gradientului pozitiv al ambelor caracteristici crește odată cu creșterea numărului Mach.

EVZU a fost dezvoltat și utilizat pentru prima dată pe aeronava experimentală hipersonică X-90 dezvoltată de NPO Raduga (rachetă de croazieră, conform clasificării NATO AS-19 Koala)

Ca urmare, configurația aerodinamică a prototipului a fost dezvoltată conform schemei „hibrid” numită de autori cu integrarea EVZU în sistemul de transport.
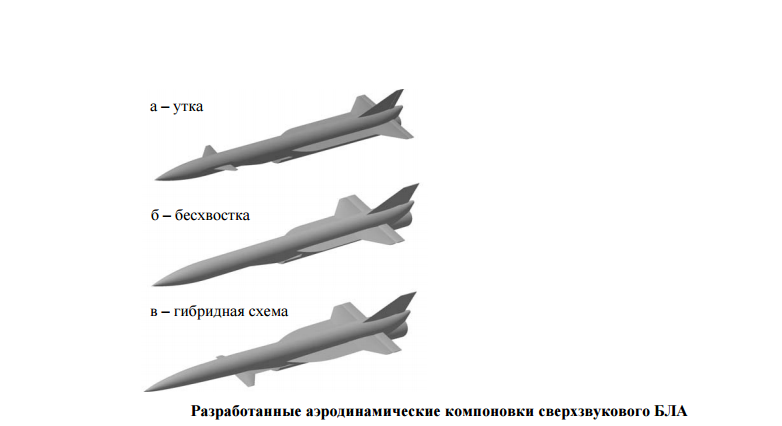
Schema hibridă are caracteristici atât ale schemei „de rață” (după numărul și locația suprafețelor portante), cât și ale schemei „fără coadă” (după tipul de comenzi longitudinale). Traiectoria tipică a MUAV include lansarea de la un lansator de la sol, accelerarea cu un propulsor de propulsie solidă la o viteză de lansare supersonică ramjet, zborul conform unui program dat cu o secțiune orizontală și decelerația la o viteză subsonică scăzută cu o viteză moale. aterizare pe o parașuta.
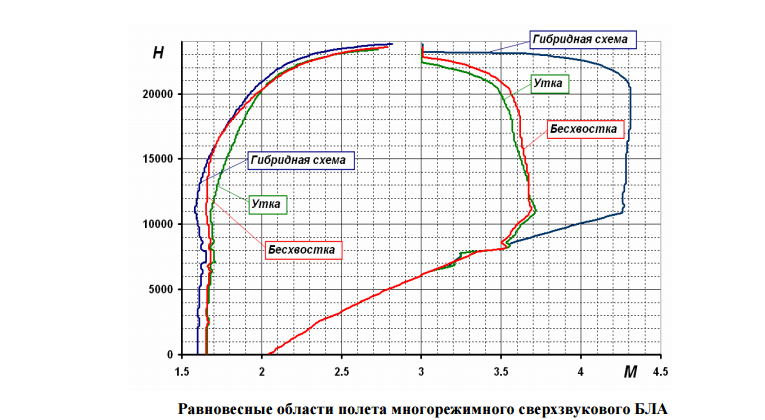
Se poate observa că aspectul hibrid, datorită efectului de ecran mai mare și optimizării aspectului aerodinamic pentru rezistența minimă la α = 1.2°…1.4°, realizează numere Mach maxime de zbor semnificativ mai mari M ≈ 4.3 într-o gamă largă de altitudini. H = 11…21 km. Schemele „rață” și „fără coadă” ating valoarea maximă a numărului M = 3.72 ... 3.74 la o înălțime de H = 11 km. În același timp, schema hibridă are un câștig mic datorită deplasării rezistenței minime chiar și la numere Mach scăzute, având o gamă de numere de zbor M = 11 ... 1.6 la o altitudine de H ≈ 4.25 km. Cea mai mică zonă de zbor de echilibru este realizată în schema „rață”.
Tabelul arată datele de performanță de zbor calculate pentru layout-urile dezvoltate pentru rutele tipice de zbor.
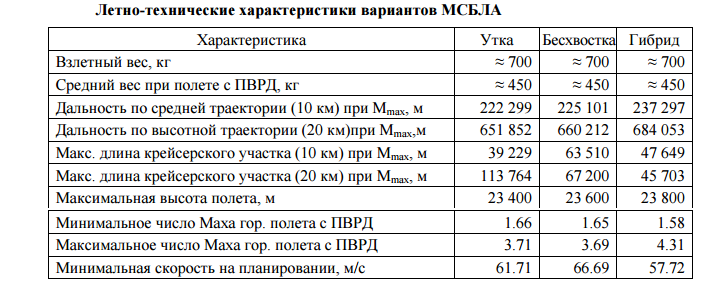
Intervalele de zbor, având același nivel pentru toate variantele de MUA, au arătat posibilitatea creării cu succes a unei aeronave cu accelerație cu o aprovizionare relativă ușor crescută de combustibil kerosen cu distanțe de zbor supersonice de ordinul 1500–2000 km pentru întoarcerea la casă. aerodrom. În același timp, aspectul hibrid dezvoltat, care este o consecință a integrării profunde a schemei aerodinamice și a admisiei de aer pe ecran a unui motor ramjet, a avut un avantaj clar în ceea ce privește vitezele maxime de zbor și intervalul de altitudine în care se realizează vitezele maxime. Valorile absolute ale numărului de Mach și altitudinii de zbor, atingând Mmax = 4.3 la Hmax Mmax = 20 m, ne permit să vorbim despre fezabilitatea la nivelul tehnologiilor existente în Rusia a unui sistem aerospațial reutilizabil cu un înalt hipersonic. aeronave de rapel de altitudine, care reduce greutatea și, în consecință, costul spațiului de unică folosință de 500-6 ori în comparație cu lansarea de la sol.
Acest aranjament aerodinamic a fost opțiunea finală pentru luarea în considerare a unui vehicul aerian fără pilot multimod reutilizabil cu viteze supersonice mari de zbor.
Concept și aspect general
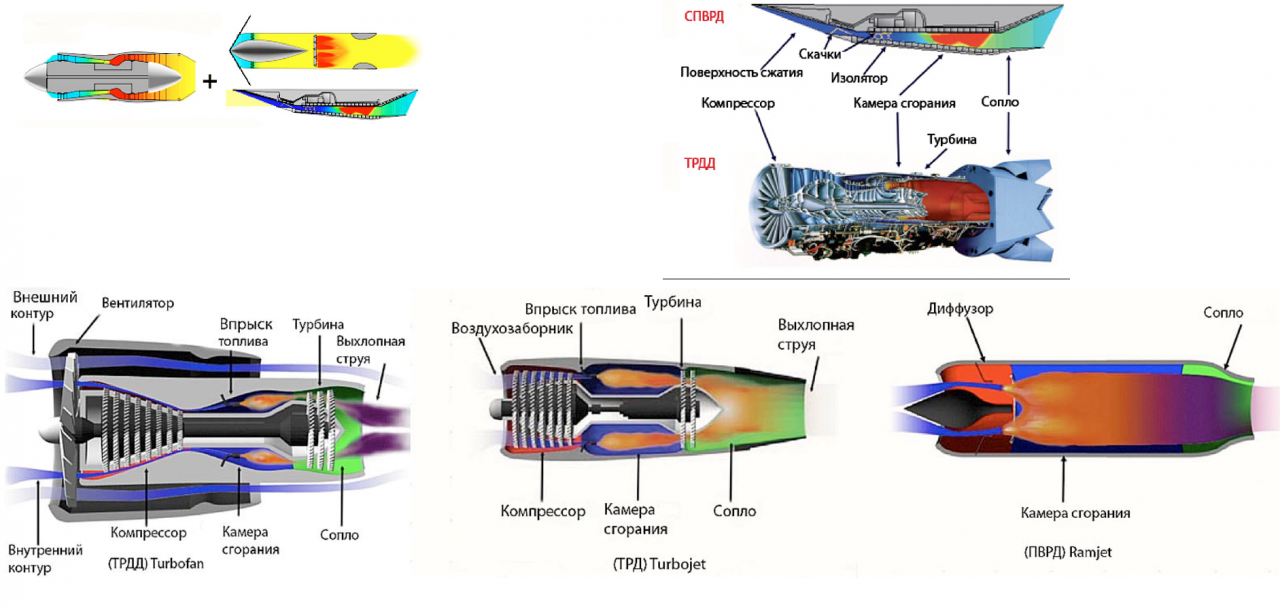
O cerință distinctivă pentru o aeronavă care accelerează, în comparație cu prototipul său de dimensiuni mici, este decolarea / aterizarea pe un avion de pe aerodromurile existente și necesitatea de a zbura la numere de Mach mai mici decât ramjetul de lansare Mach M < 1.8 ... 2 Aceasta determină tipul și compoziția centralei combinate a aeronavei -accelerator, care încorporează un motor ramjet și motoare turboreactor cu postcombustion (TRDF).
Pe baza acesteia, s-a format forma tehnică și aspectul general al aeronavei de propulsie pentru sistemul de transport spațial de clasă uşoară cu o sarcină utilă de proiectare de aproximativ 1000 kg pe o orbită terestră joasă de 200 km. Parametrii de greutate ai unei etape orbitale lichide în două etape bazate pe motorul de oxigen-kerosen RD-0124 au fost estimați prin metoda vitezei caracteristice cu pierderi integrale, pe baza condițiilor de lansare de la accelerator.

În prima etapă se instalează motorul RD-0124 (împinge în gol 30 kg, impuls specific 000 s), dar cu un diametru redus al cadrului și camere mai apropiate, sau motorul RD-359M (diferă de cel de bază cu o singură cameră și o nouă duză cu diametru mai mare); în a doua etapă, un motor cu o cameră din RD-0124 (a fost adoptată o tracțiune goală de 0124 kg). Pe baza rezumatului greutății primite a etapei orbitale cu o greutate totală de 7 kg, a fost dezvoltată configurația sa și, pe baza acesteia, a fost proiectată o aeronavă hipersonică de propulsie pentru o greutate la decolare de 500 kg cu o centrală electrică combinată ( CPU).
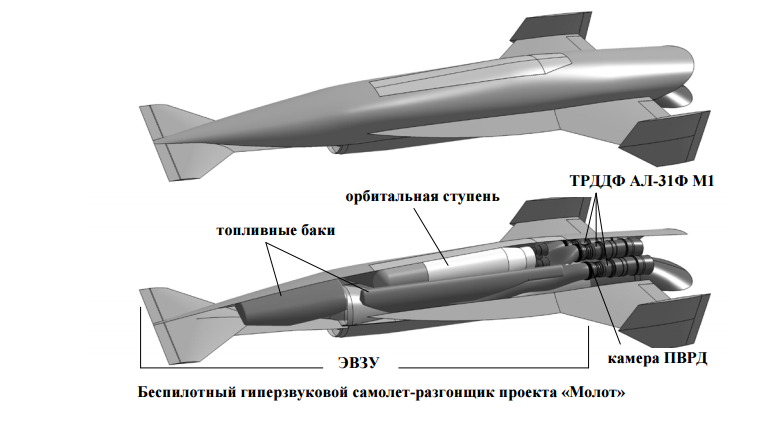
KSU include:
• Un ramjet cu același tip și același aspect al camerei de ardere ca și prototipul EVZU;
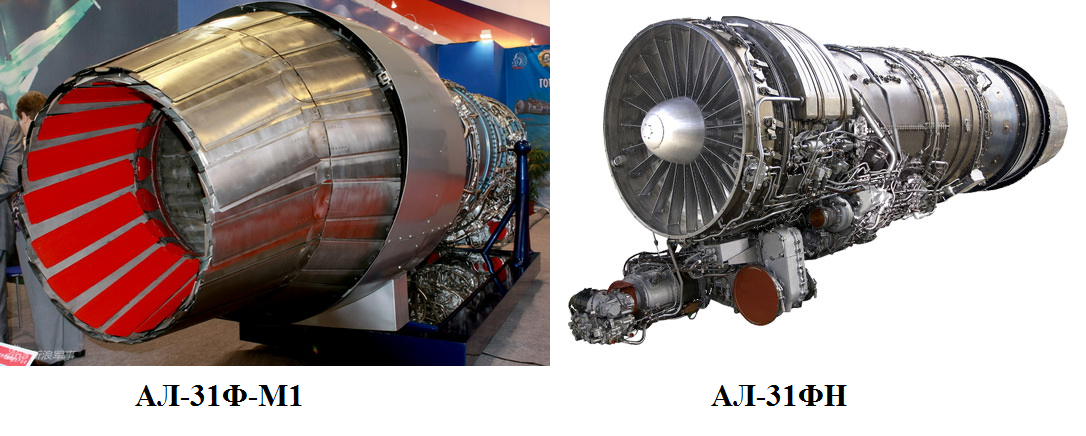
• Trei motoare turbojet AL-31F M1 post-ardere
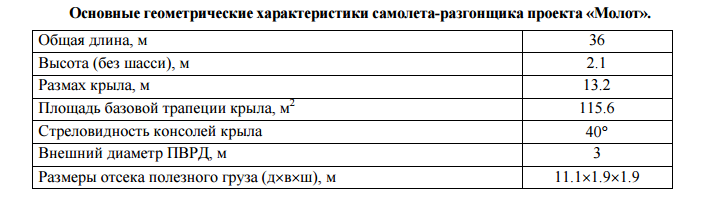
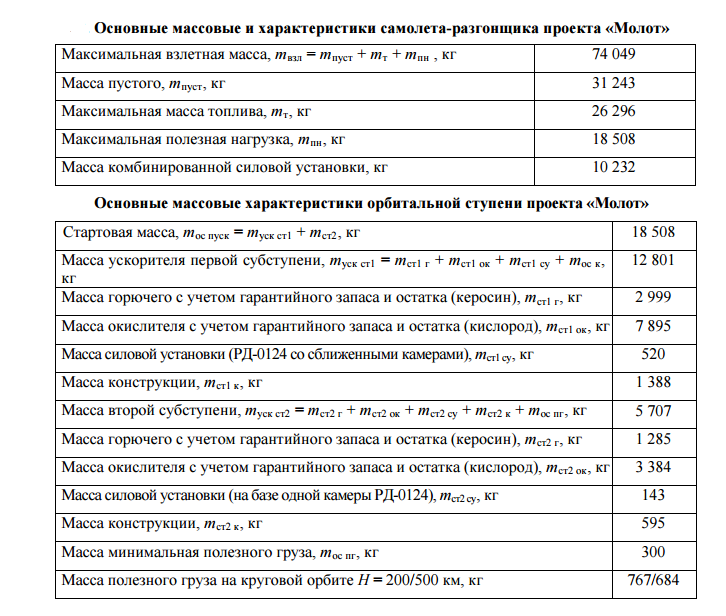
Motoarele turboventilatoare și ramjet sunt aranjate într-un pachet vertical, ceea ce permite ca fiecare dintre ele să fie montat și întreținut separat. Pentru a găzdui un ramjet cu un EVZU de dimensiune maximă și, în consecință, de tracțiune, a fost folosită întreaga lungime a aparatului. Greutatea maximă la decolare a dispozitivului este de 74 de tone, iar greutatea goală este de 31 de tone.
Secțiunea prezintă stadiul orbital - un vehicul de lansare cu propulsie lichidă în două trepte, cântărind 18,5 tone, care lansează o sarcină utilă de 1000 kg pe o orbită terestră joasă de 200 km. De asemenea, sunt vizibile 3 motoare turboventilatoare AL-31FM1.
Testarea experimentală a unui ramjet de această dimensiune ar trebui să fie efectuată direct în testele de zbor, folosind un motor turboventilator pentru accelerare. La dezvoltarea unui sistem unificat de admisie a aerului, au fost adoptate următoarele principii de bază:
• Un minim de piese mobile cu sarcini de putere minime asupra acestora;
• Păstrarea completă a geometriei teoretice a ramjetului VZU al prototipului.
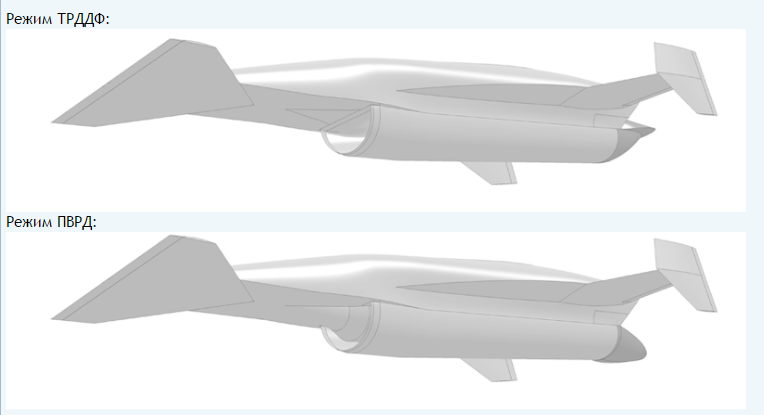
Implementat prin separarea conductelor de aer pentru turboventilatorul și motoarele ramjet în spatele părții supersonice a admisiei de aer și dezvoltarea unui dispozitiv transformator simplu de executat care convertește partea supersonică a EVZU înainte și înapoi în configurații nereglementate, în timp ce comută simultan aerul. alimentarea dintre canale. EVRU al dispozitivului la decolare funcționează pe motorul turboventilator, când viteza este setată la M = 2,0, trece la ramjet.
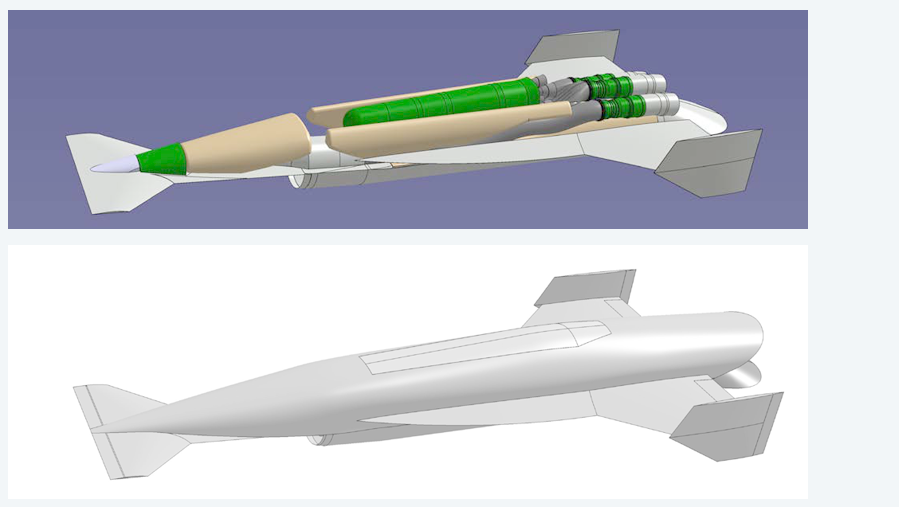
În spatele dispozitivului transformator EVZU, compartimentul de sarcină utilă și rezervoarele principale de combustibil sunt amplasate într-un pachet orizontal. Utilizarea rezervoarelor de inserție este necesară pentru decuplarea termică a structurii fuzelajului „fierbinte” și a rezervoarelor termoizolate „rece” cu kerosen. În spatele compartimentului de sarcină utilă se află un compartiment turboventilator, care are canale de curgere pentru răcirea duzelor motorului, structura compartimentului și clapeta superioară a duzei ramjet în timpul funcționării turboventilatorului.
Principiul de funcționare al transformatorului EVZU al aeronavei de accelerare elimină, într-o mică măsură, rezistența la forță față de partea în mișcare a dispozitivului din partea fluxului care se apropie. Acest lucru minimizează masa relativă a sistemului de admisie a aerului prin reducerea masei dispozitivului în sine și a acționării acestuia în comparație cu prizele de aer dreptunghiulare tradiționale reglabile. Servoreactor are o duză de despicare, care, atunci când este închisă, în timpul funcționării motorului turboventilator, asigură un flux neseparat al fluxului în jurul fuzelajului. La deschiderea stivuitorului de duze la trecerea la modul de operare ramjet, clapeta superioară închide secțiunea inferioară a compartimentului turboventilatorului. Duza ramjet în formă deschisă este un confuzor supersonic și, cu un anumit grad de subexpansiune a jet ramjet, care se realizează la numere mari de Mach, asigură o creștere a forței datorită proiecției longitudinale a forțelor de presiune pe clapeta superioară.
În comparație cu prototipul, aria relativă a panourilor aripilor a fost semnificativ crescută din cauza necesității decolării/aterizării aeronavei. Mecanizarea aripii include doar eloni. Chilele sunt echipate cu cârme care pot fi folosite ca plăcuțe de frână pentru aterizare. Pentru a asigura continuitatea fluxului la viteze de zbor subsonice, ecranul are un deget deflectabil. Trenul de rulare al aeronavei care accelerează este cu patru stâlpi, cu plasare de-a lungul părților laterale pentru a preveni pătrunderea murdăriei și a obiectelor străine în priza de aer. O astfel de schemă a fost elaborată pe produsul EPOS - un analog al sistemului de aeronave orbitale „Spiral”, care permite, similar unui șasiu de bicicletă, să se „ghemuiască” la decolare.
Pentru a determina greutățile de zbor, poziția centrului de masă și momentele proprii de inerție ale aeronavei care accelera, a fost dezvoltat un model solid simplificat într-un mediu CAD.
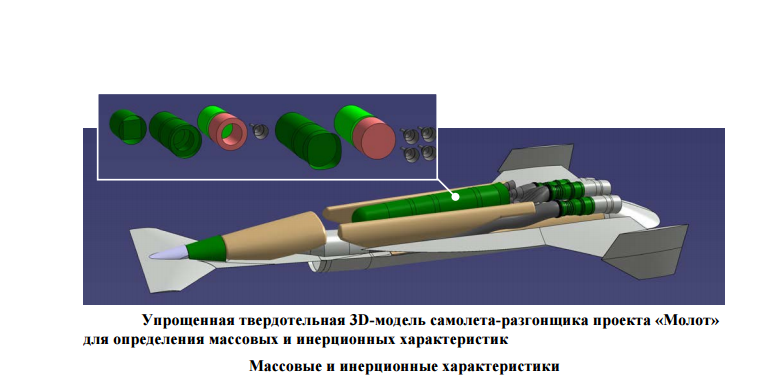
Proiectarea, centrala electrică și dotarea aeronavei de propulsie au fost împărțite în 28 de elemente, fiecare dintre acestea fiind evaluată printr-un parametru statistic (greutatea specifică a pielii reduse etc.) și modelată ca element solid similar geometric. Pentru proiectarea fuzelajului și a suprafețelor portante au fost utilizate statisticile de greutate pentru aeronave de tip MiG-25/MiG-31. Masa motorului AL-31F M1 este luată „de fapt”. Diferite procente de umplere cu kerosen au fost modelate prin „turnări” solide trunchiate ale cavităților interne ale rezervoarelor de combustibil.
De asemenea, a fost dezvoltat un model în stare solidă simplificat al etapei orbitale.Masele elementelor structurale au fost luate pe baza datelor de pe blocul „I” (a treia etapă a vehiculului de lansare Soyuz-2 și a promițătorului vehicul de lansare Angara ) cu alocarea componentelor constante și variabile în funcție de masa combustibilului.
Câteva caracteristici ale rezultatelor obținute ale aerodinamicii aeronavei dezvoltate:
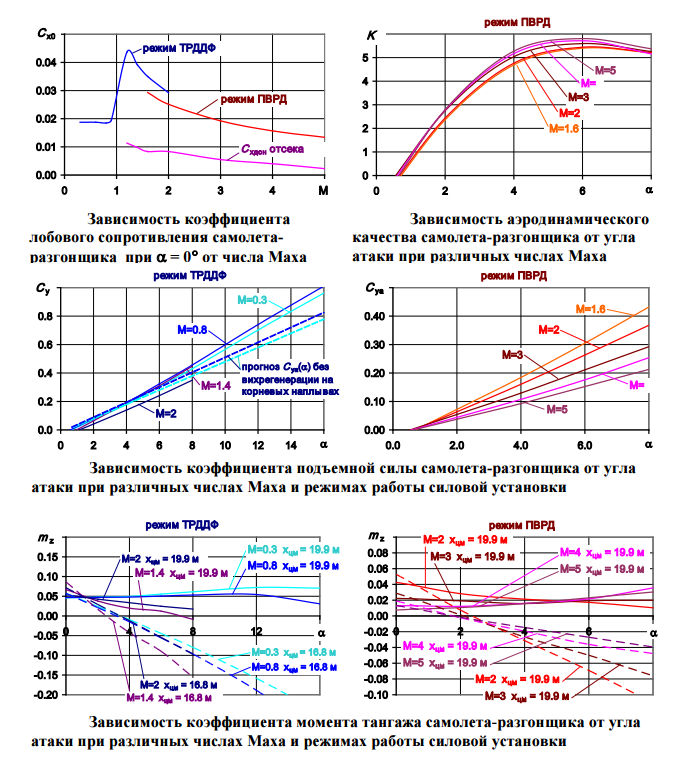
Pe aeronava care accelerează, pentru a crește raza de zbor, modul de planare este utilizat atunci când este configurat pentru un ramjet, dar fără alimentare cu combustibil. În acest mod, se folosește o duză de scurgere, care își reduce soluția atunci când ramjetul este oprit în zona fluxului care asigură fluxul în canalul EVZU, astfel încât împingerea difuzorului subsonic al canalului devine egală cu rezistenta duzei:
Pdif EVZU = ramjet Xss. Pur și simplu, principiul funcționării unui dispozitiv de accelerare este utilizat la unitățile de testare TsAGI SVS-2. Duza de stivuire asamblată deschide secțiunea inferioară a compartimentului motorului turbofan, care începe să-și creeze propria rezistență inferioară, dar mai mică decât rezistența ramjetului oprit cu flux supersonic în canalul VDU. În testele EVZU la instalația TsAGI SVS-2, funcționarea stabilă a admisiei de aer a fost demonstrată de la numărul Mach M = 1.3, astfel încât se poate argumenta că modul de alunecare cu utilizarea unei duze de stivuire ca accelerație EVZU în se poate afirma intervalul 1.3 ≤ M ≤ Mmax.
Performanța zborului și traiectoria tipică de zbor
Sarcina aeronavei booster este de a lansa scena orbitală de pe bord în zbor, la o altitudine, viteza de zbor și unghiul de traiectorie care îndeplinesc condiția masei maxime a sarcinii utile pe orbita de referință. În etapa preliminară a cercetării proiectului Molot, sarcina este de a atinge altitudinea maximă și viteza de zbor a acestei aeronave atunci când se folosește manevra „deal” pentru a crea valori pozitive mari ale unghiului de traiectorie pe ramura sa ascendentă. În acest caz, condiția de minimizare a capului de viteză în timpul separării treptei este stabilită pentru o reducere corespunzătoare a masei carenului și pentru reducerea sarcinilor pe compartimentul de sarcină utilă în poziție deschisă.
Datele inițiale privind funcționarea motoarelor au fost tracțiunea zborului și caracteristicile economice ale AL-31F, corectate în funcție de datele de banc ale motorului AL-31F M1, precum și caracteristicile prototipului ramjet recalculate proporțional cu camera de ardere. și unghiul de instalare a ecranului.
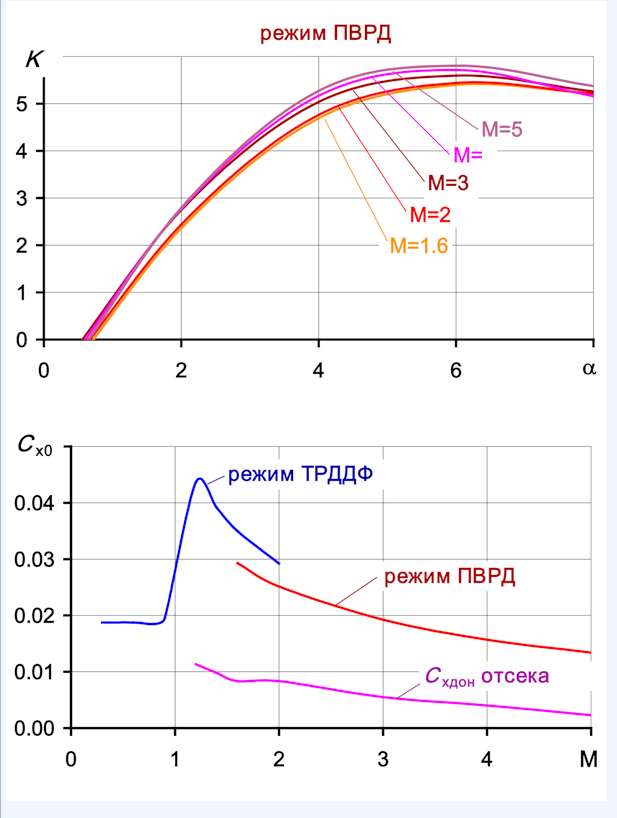
Pe fig. arată zonele de zbor constant orizontal ale unei aeronave hipersonice de propulsie în diferite moduri de funcționare ale centralei electrice combinate.
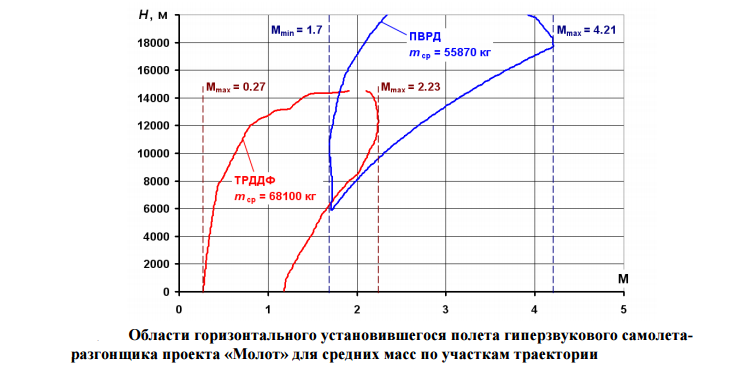
Fiecare zonă este calculată pentru media pe secțiunea corespunzătoare a acceleratorului proiectului Molot pentru masele medii pe secțiunile traiectoriei masei de zbor a vehiculului. Se poate observa că aeronava care accelerează atinge numărul Mach maxim de zbor M = 4.21; atunci când zboară pe motoare cu turboreacție, numărul Mach este limitat la M = 2.23. Este important de remarcat faptul că graficul ilustrează necesitatea de a furniza forța ramjet necesară pentru aeronava care accelerează într-o gamă largă de numere Mach, care a fost obținută și determinată experimental în timpul lucrului la dispozitivul de admisie a aerului ecran al prototipului. Decolarea se efectuează la o viteză de decolare V = 360 m/s - proprietățile de rezemare ale aripii și ale ecranului sunt suficiente fără utilizarea mecanizării de decolare și aterizare și a planării elevatorului. După urcarea optimă pe secțiunea orizontală H = 10 m, aeronava care accelerează atinge viteza supersonică de la numărul subsonic Mach M = 700, centrala electrică combinată este comutată la M = 0.9 și accelerația preliminară la Vopt la M = 2. În procesul de urcare pe ramjet, aeronava care accelerează efectuează o viraj către aerodromul de origine și atinge o altitudine H2.46peak = 0 m la un număr Mach M = 20.
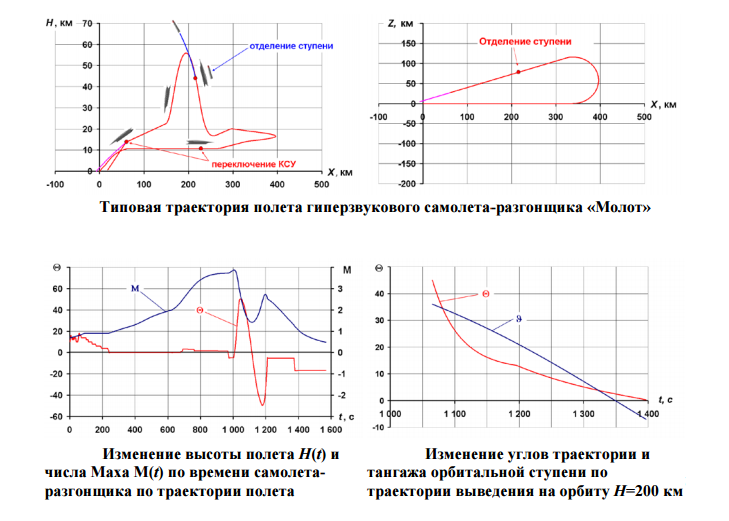
La această altitudine, începe o manevră dinamică pentru a atinge altitudinea maximă de zbor și unghiul de traiectorie pentru lansarea etapei orbitale. Se efectuează o scufundare blândă cu accelerare până la M = 3.9 și manevra „deal” ulterioară. Statorjetul își încheie funcționarea la o altitudine de H ≈ 25000 m, iar urcarea ulterioară are loc datorită energiei cinetice a amplificatorului. Lansarea etapei orbitale are loc pe ramura ascendentă a traiectoriei la o altitudine Hlaunch = 44 m la un număr Mach M = 049 și un unghi de traiectorie θ = 2.05°. Aeronava care accelerează atinge o înălțime de Hmax = 45 m pe „deal”.Pe ramura descendentă a traiectoriei, la atingerea numărului Mach M = 55, se comută ramjet → turboreactor pentru a elimina supratensiunea admisiei de aer ramjet. .
În configurarea turboventilatorului, aeronava care accelerează planează până la atingerea traiectoriei, având la bord o alimentare cu combustibil Ggf = 1000 kg.
În modul normal, întregul zbor din momentul în care ramjetul este oprit și până la aterizare are loc fără utilizarea motoarelor cu o marjă în raza de alunecare.
Modificarea parametrilor unghiulari ai mișcării pasului este prezentată în această figură.
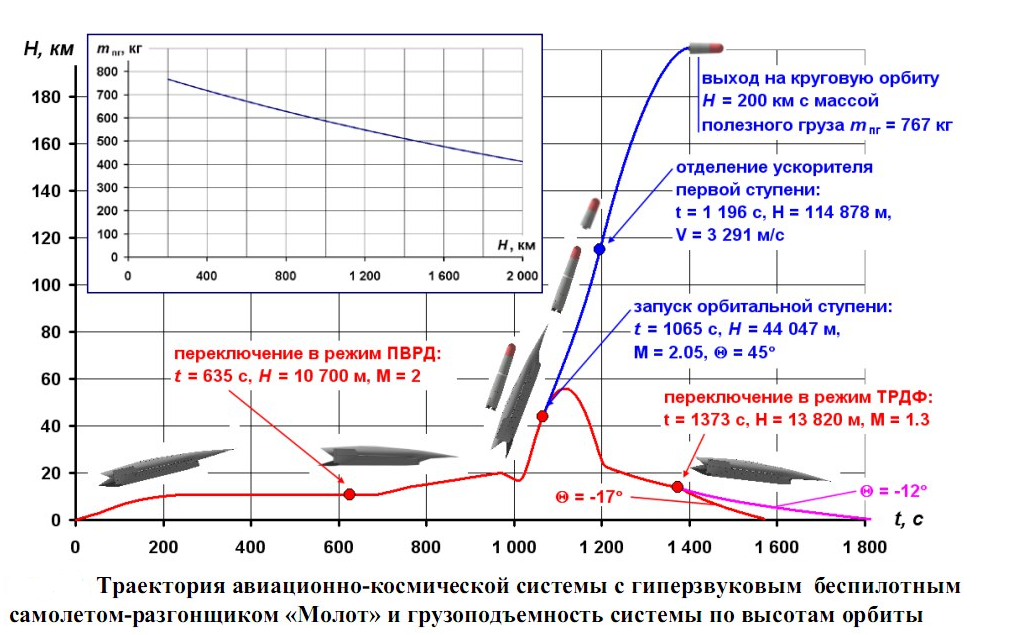
Când este lansat pe o orbită circulară H = 200 km la o altitudine H = 114 878 m la o viteză V = 3 291 m/s, primul accelerator de subetapă se separă. Masa celei de-a doua subetape cu o sarcină pe orbită H = 200 km este de 1504 kg, din care sarcina utilă este mpg = 767 kg.
Schema de aplicare și calea de zbor a aeronavei de propulsie hipersonică a proiectului Molot este analogă cu proiectul american „universitar” RASCAL, care este creat cu sprijinul departamentului guvernamental DARPA.
O caracteristică a proiectelor Molot și RASCAL este utilizarea unei manevre dinamice de tip cocoaș cu acces pasiv la altitudini mari de lansare ale etapei orbitale Hlaunch ≈ 50 m la presiuni de viteză redusă, pentru Molot qlansare = 000 kg/m24. Altitudinea de lansare face posibilă reducerea pierderilor gravitaționale și a timpului de zbor al unei etape orbitale de unică folosință costisitoare, adică masa sa totală. Presiunile de lansare cu viteză scăzută fac posibilă reducerea la minimum a masei carenei de sarcină utilă sau abandonarea ei completă în unele cazuri, ceea ce este esențial pentru sistemele de clasă ultrauşoară (mpgN2<200 kg).
Avantajul fundamental al aeronavei de propulsie a proiectului Molot în comparație cu RASCAL este lipsa rezervelor de oxigen lichid la bord, ceea ce simplifică și reduce costurile de funcționare a acestuia și exclude tehnologia nedezvoltată. aviaţie rezervoare criogenice reutilizabile. Raportul tracțiune-greutate în modul de funcționare ramjet permite acceleratorului Molot să realizeze pe ramura ascendentă a „dealului” unghiurile de traiectorie „de lucru” pentru treapta orbitală θstart ≈ 45°, în timp ce amplificatorul RASCAL îi asigură etapă orbitală cu un unghi de traiectorie de pornire de numai θstart ≈ 20° cu pierderi ulterioare datorate manevrei de întoarcere a etapei.
În ceea ce privește capacitatea de încărcare specifică, sistemul aerospațial cu acceleratorul hipersonic fără pilot Molot depășește sistemul RASCAL: (mpgN500/mvzl)ciocan = 0.93%, (mpnN486/mvzl)răscal = 0.25%.
Astfel, tehnologia unui motor ramjet cu o cameră de combustie subsonică („cheia” proiectului Molot) dezvoltată și stăpânită de industria aerospațială internă depășește promițătoarea tehnologie americană MIPCC de injectare a oxigenului în conducta de admisie a aerului turboventilatorului în aeronavele cu accelerație hipersonică. .
O aeronavă hipersonică fără pilot cu o masă de 74 kg decolează de pe aerodrom, accelerează, urcă pe o traiectorie optimizată cu o viraj intermediară până la punctul de decolare până la o înălțime de H = 000 m și M = 20, o dinamică „ manevră de deal” cu accelerație intermediară într-un baldachin scufundare până la М = 000. Pe ramura ascendentă a traiectoriei la H = 3.73 m, M = 3.9, este separată o treaptă orbitală în două trepte cu o masă de 44 kg, proiectată pe baza motorului RD-047.
După depășirea „dealului” Нmax = 55 871 m în regim de planare, acceleratorul efectuează un zbor către aerodrom, cu o alimentare garantată cu combustibil de 1000 kg și o greutate la aterizare de 36 579 kg. Etapa orbitală pune pe o orbită circulară H = 200 km o sarcină utilă cu o masă mpg = 767 kg, la H = 500 km mpg = 686 kg.
Ajutor.
1. Laboratorul și baza de testare a NPO Molniya include următoarele complexe de laborator:
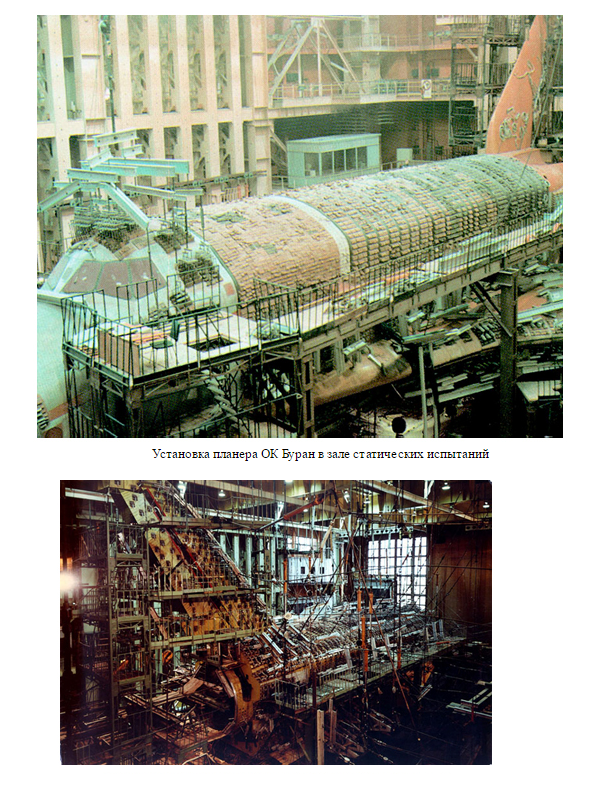
Laborator de încercări de rezistență statică
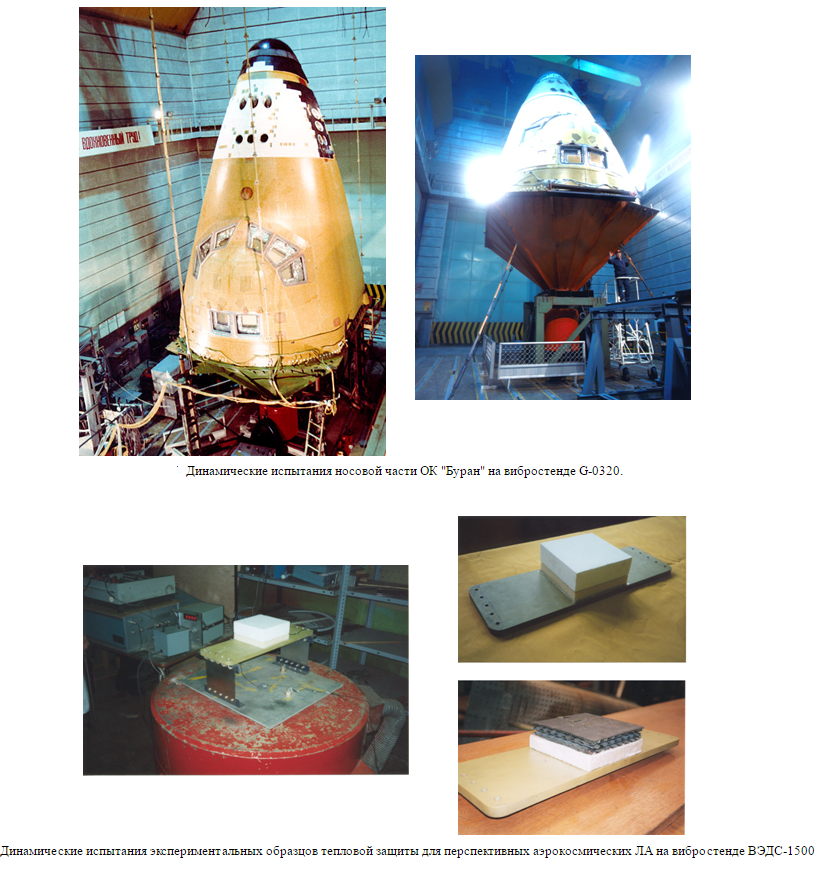
Laborator de încercări dinamice
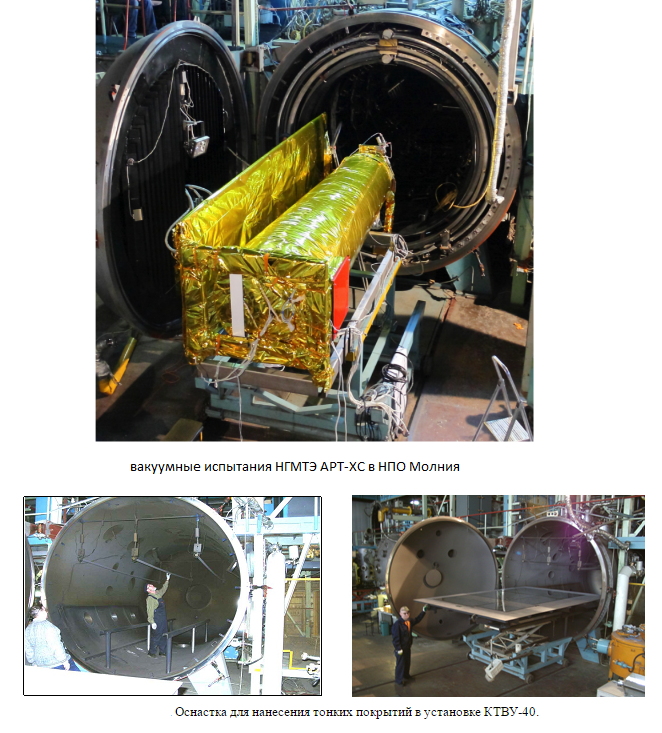
Laborator de testare criotermală în vid
Laborator de testare a mediului
Laborator de teste tribologice
2. Și acesta este un proiect al unei aeronave civile de mare viteză HEXAFLY-INT

Care este unul dintre cele mai mari proiecte de cooperare internațională. În aceasta sunt implicate organizații de vârf europene (ESA, ONERA, DLR, CIRA etc.), ruse (TsAGI, CIAM, LII, MIPT) și australiene (Universitatea din Sydney etc.).

3. Rostec nu a permis falimentul întreprinderii care a dezvoltat naveta spațială „Buran”
Notă: Modelul 3-D de la începutul articolului nu are nicio legătură cu proiectul de cercetare „Hammer”.
Articol bazat pe muncă:
Proiectul Molot al unei aeronave hipersonice fără pilot cu accelerație cu un sistem de propulsie cu ecran combinat turbo-ramjet
/Makeich G. S., Tyukaev M. Yu. (Institutul de Aviație din Moscova (Universitatea Națională de Cercetare), Autostrada Volokolamsk, 4, Moscova, A-80, GSP-3, 125993, Rusia), Chibisov Ya. N. (OAO Nauchno - asociație de producție „Molniya”)/
Materiale folosite, fotografii și videoclipuri
http://www.mai.ru/
http://www.ciam.ru/
http://www.npomolniya.ru/
http://en.avia.pro/
http://www.darpa.mil/
www.youtube.com
http://otvaga2004.ru/
http://www.3dmir.ru/forum/read/5075.html
http://www.globalsecurity.org/
http://36on.ru/news/economics/64320-v-sovete-federatsii-proshli-dni-voronezhskoy-oblast
informații