Evoluția sistemelor de control ale navelor spațiale sovietice timpurii

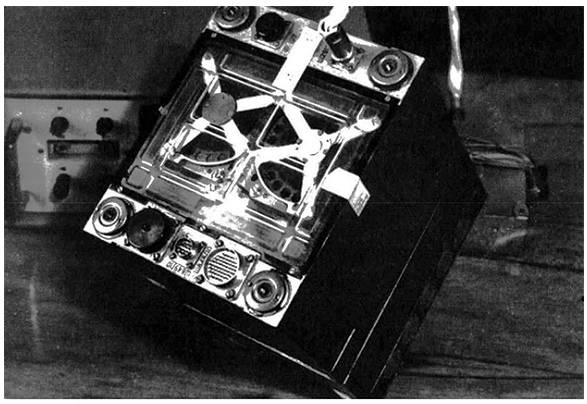
Modelul Sputnik 1 care arată dispozitivele interne. Fotografie a Muzeului de Cosmonautică
Este greu de imaginat o navă spațială modernă, de unică folosință sau reutilizabilă, internă sau străină, fără un sistem de control complex construit pe baza unor computere puternice. Cu toate acestea, acesta nu a fost întotdeauna cazul. Vechile nave spațiale proiectate de sovietici nu aveau deloc sisteme de control. Apoi au apărut primele dispozitive simple pe dispozitive, iar evoluția lor ulterioară a dus la apariția computerelor multifuncționale cu drepturi depline.
Pe o traiectorie dată
Sondele și dispozitivele interne și străine utilizate în experimentele și cercetările timpurii în domeniul tehnologiei rachetelor și spațiale nu aveau sisteme de control cu drepturi depline. La bord existau dispozitive de automatizare pentru unități și sisteme individuale, dar nu era oferită posibilitatea controlului complet al zborului. Mai mult, la vremea aceea nu era nevoie de ele.
De exemplu, primul satelit artificial de Pământ SP-1 („Sputnik-1”), lansat în octombrie 1957, avea la bord un pachet de baterii, un dispozitiv de transmisie radio, un set de senzori și mijloace de răcire. Nu existau dispozitive pentru determinarea coordonatelor și a poziției în spațiu, precum și pentru controlul zborului. Satelitul a trebuit să se deplaseze pe traiectoria determinată la lansare.

Modelul Sputnik 2. Clădirea inferioară adăpostește o „cabină” cu un loc pentru câine. Foto: Wikimedia Commons
Următorul Sputnik 2 a fost construit folosind un principiu similar, a cărui sarcină utilă era un container cu câinele Laika. La bord se aflau instrumente doar pentru colectarea și transmiterea datelor despre starea animalului. Cu toate acestea, a fost avută în vedere și automatizarea unor procese, precum răcirea containerului locuibil.
Telecomanda
Chiar și în etapa preliminară de dezvoltare, a devenit clar că tehnologia spațială promițătoare trebuie să aibă un fel de mijloace de control. În mod independent sau sub comanda Pământului, sateliții trebuie să pornească instrumentele, să efectueze cercetări etc. Astfel de probleme de proiectare au fost rezolvate până la începutul anului 1958, în timpul creării următoarei nave spațiale.
În mai 1958, Sputnik 3 sau obiectul „D” a intrat pe orbită. Pentru prima dată în practica casnică, acest dispozitiv a primit control automat și de la distanță. Sistemul de instrumente de bord ar putea primi și executa comenzi de la stația de control de la sol. La bord se aflau 12 instrumente științifice în diverse scopuri, care erau pornite și oprite prin comandă sau printr-un dispozitiv software-time de bord. În plus, în anumite părți ale orbitei unde nu exista comunicare cu Pământul, înregistrarea telemetrică pe bandă magnetică a fost activată automat. După restabilirea conexiunii, informațiile înregistrate au fost transmise.
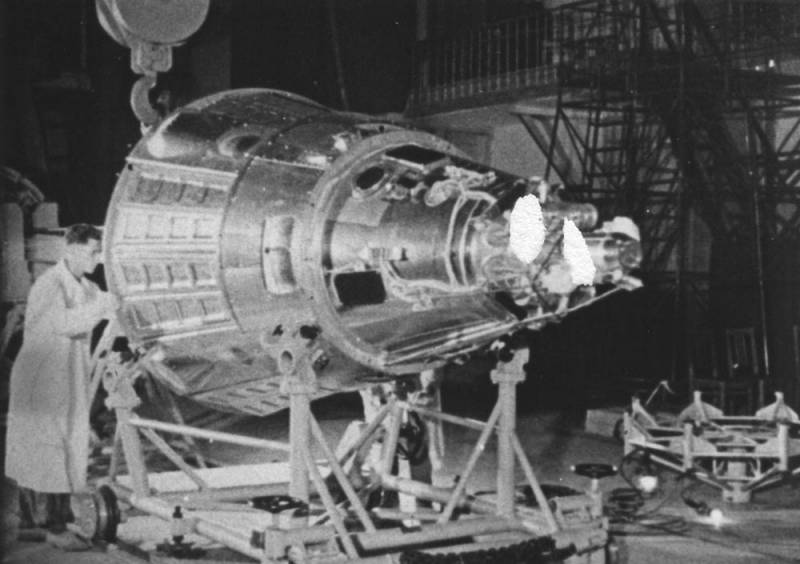
„Sputnik-3” / „D” în faza de asamblare. Fotografie de RGANTD
Curând, telecomanda cu comandă radio a fost folosită în domeniul explorării interplanetare. Începând cu toamna anului 1958, URSS a făcut mai multe încercări de a trimite stații interplanetare automate pe Lună. Primele lansări s-au încheiat cu accidente și abia în ianuarie 1959, nava spațială Luna-1 a reușit să treacă aproape de satelitul natural al Pământului. În septembrie același an, aparatul Luna-2 și-a făcut prima aterizare pe Lună - greu, cu distrugere structurală.
La bordul primelor produse Luna se afla un set de instrumente de măsurare în diverse scopuri, dispozitive pentru monitorizarea funcționării acestora, precum și o stație radio pentru primirea comenzilor și transmiterea telemetriei. Pentru zborul spre Lună, stațiile au fost instalate pe așa-zisa. blocul „E” – a treia etapă a vehiculului de lansare Vostok-L cu posibilitatea de control de la distanță. Unitatea a fost responsabilă pentru aducerea AMS pe traiectoria proiectată.
După lansare, zborul rachetei Vostok-L cu Luna a fost urmărit de la sol de echipamente radar create inițial pentru testarea rachetelor balistice. Datele de traiectorie au fost primite și procesate de un complex de calcul special bazat pe mașina BESM-2. Când produsul „E” cu „Luna” a deviat de la traiectoria optimă, complexul i-a generat și i-a transmis comenzi pentru a corecta traiectoria. În general, acest sistem a funcționat bine, deși au existat unele erori.
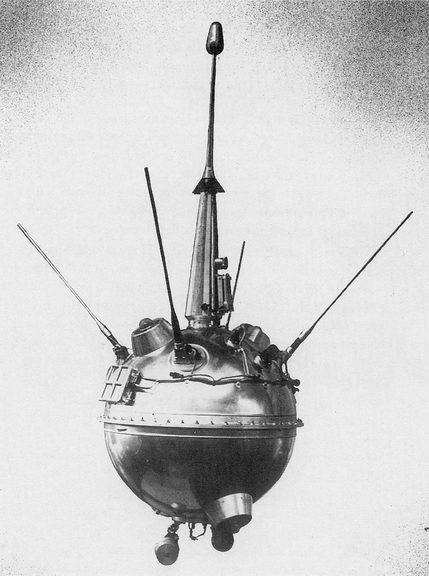
Stația automată „Luna-2”. Foto: Wikimedia Commons
Caracteristici noi
Navele spațiale timpurii puteau zbura doar de-a lungul unei traiectorii precalculate, pe care au fost lansate de un vehicul de lansare sau de o treaptă superioară. Pentru dezvoltarea în continuare a programelor spațiale a fost necesară dezvoltarea unor mijloace de control care să permită orientarea dispozitivului în spațiu și efectuarea de manevre.
Primele succese în această direcție au fost obținute în timpul dezvoltării satelitului Luna-3, care a fost lansat cu succes în octombrie 1959. Un sistem original de orientare fototelemetrică Chaika a fost creat pentru această stație. Acesta includea elemente optice care determinau poziția Soarelui și a Lunii în raport cu AMS, un dispozitiv de calcul și motoare de manevră. Echipamentul științific al stației, ca și până acum, a funcționat după un program stabilit sau după comenzi de la centrul de control.
Prezența sistemului Chaika a permis lui Luna-3 să fotografieze satelitul natural al Pământului, inclusiv. reversul acestuia. Ulterior, evoluțiile acestui sistem și ideile sale de bază au fost utilizate activ în alte proiecte de tehnologie spațială.
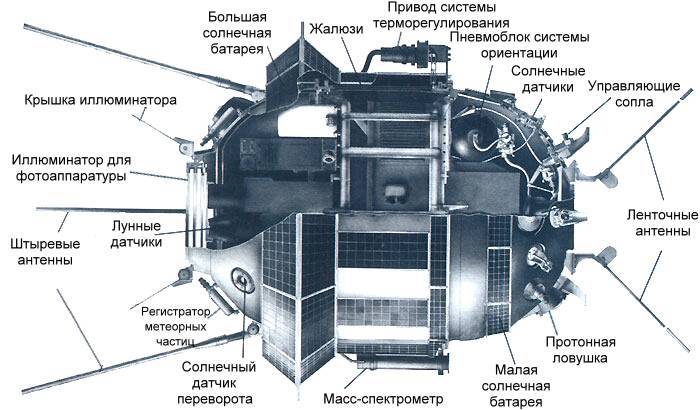
„Luna-3” cu sistemul de orientare „Chaika”. Grafică Astronaut.ru
Control autonom
Din 1957, dezvoltarea unei nave spațiale promițătoare cu echipaj, numită ulterior Vostok, a fost în curs de desfășurare. A primit sisteme de control automate și manuale care se duplicau între ele. Toate mijloacele se distingeau printr-o anumită simplitate și corespundeau sarcinilor atribuite. Astfel, echipamentul a făcut posibilă efectuarea orientării pe orbită și efectuarea coborârii. Alte funcții erau practic absente. Pentru orientarea în spațiu, nava avea un set de motoare de putere redusă controlate automat sau de un astronaut.
Alinierea orizontală a fost realizată cu ajutorul senzorilor cu infraroșu. De-a lungul axei orbitale, nava a fost orientată de Soare (automat) sau de Pământ, folosind dispozitivul Vzor (manual). În mod independent sau la comandă, automatizarea ar putea efectua o coborâre de pe orbită folosind un sistem de propulsie de frânare. Astronautul a fost rugat să îndeplinească aceste sarcini folosind dispozitivul de navigație Globus, care a calculat aria aproximativă de aterizare.
În mai 1960, prima lansare a Vostok-ului experimental a avut loc într-o configurație fără pilot. Dispozitivul, denumit Sputnik 4, nu a putut să se întoarcă pe Pământ din cauza unei defecțiuni a sistemului de orientare. Apoi au mai avut loc câteva starturi, inclusiv. cu o încărcătură utilă de echipament științific, animale și manechine. De exemplu, pe 19 august 1960, faimoșii Belka și Strelka au plecat în spațiu. Din motive evidente, aceste zboruri au folosit doar control automat și de la distanță.

Panoul de instrumente al navei spațiale cu echipaj Vostok. Foto: Wikimedia Commons
În cele din urmă, pe 12 aprilie 1961, a avut loc primul zbor al lui Vostok într-o configurație cu echipaj. Sub controlul primului pilot-cosmonaut din lume Yu.A. Nava spațială a lui Gagarin a finalizat o orbită și s-a întors cu succes pe Pământ. În următorii doi ani, au existat încă cinci lansări de nave spațiale Vostok cu astronauți și un număr mare de teste fără pilot. Toate aceste activități au confirmat funcționalitatea noilor sisteme de control.
Computer de bord
Deja în timpul dezvoltării navei spațiale Luna sau Vostok, specialiștii sovietici lucrau la noi modalități de dezvoltare a sistemelor de control pentru nave spațiale și nave spațiale. Așadar, la sfârșitul anilor cincizeci, au început cercetările pe tema trimiterii navelor spațiale pe Marte. La început, munca a fost realizată în cadrul programului 1M.
Utilizarea controlului de comandă radio într-un astfel de program a fost practic exclusă. Instrumentele automate individuale, ca și în proiectele anterioare, au avut și dezavantajele lor. În acest sens, s-a decis crearea așa-numitului. o unitate de calcul și rezolvare bazată pe un computer central de bord, la care ar fi conectate toate celelalte sisteme AWS. Sarcina creării unui DRR a fost rezolvată cu succes, odată cu introducerea de noi soluții și a unei baze de componente moderne. În esență, vorbeam despre un singur computer de bord care îndeplinește toate sarcinile în timpul zborului.
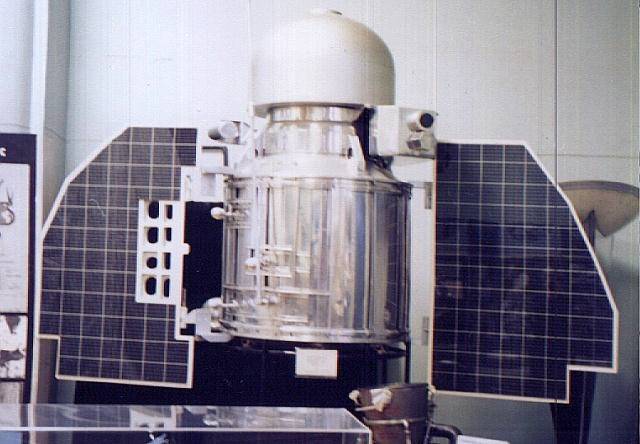
AMS „Mars-1960” cu un computer digital cu drepturi depline. Foto: Wikimedia Commons
Ca parte a programului 1M, au fost construite două stații Mars-1960. Au trebuit să zboare automat lângă Marte, să colecteze date științifice și să le transmită pe Pământ. Lansarea ambelor AWS a avut loc în octombrie 1960, iar ambele lansări s-au încheiat cu accidente - stațiile au ars în atmosferă. Nu a fost posibil să se testeze SRB în zbor.
Cu toate acestea, evoluțiile în ideea de DRR nu s-au pierdut. În curând, a început dezvoltarea „navei spațiale interplanetare grele” TMK, pe care au decis să o echipeze și cu un singur complex de calcul. Acest proiect nu a avut succes, dar dezvoltatorii săi au reușit să facă din nou progrese în crearea computerelor pentru spațiu.
În cele din urmă, ca parte a lucrărilor la TMK, a fost în cele din urmă format și elaborat conceptul unui singur computer de bord, responsabil pentru toate operațiunile și asistarea echipajului. Curând, acest concept a fost folosit pentru a crea nava spațială Soyuz cu echipaj, stațiile orbitale Salyut și o serie de alte proiecte.
Unul dintre blocurile unui computer de bord timpuriu pentru nava spațială Soyuz. Fotografie de Habr.com
Procese evolutive
În anii cincizeci și șaizeci, dezvoltarea rachetelor și a sectorului spațial a decurs într-un ritm ridicat. Evenimentele cheie care au determinat dezvoltarea ulterioară a astronauticii au avut loc cu o regularitate de invidiat și au fost adesea separate de câteva luni. În același timp, industria a angajat un număr mare de întreprinderi și specialiști din diferite domenii, ceea ce a contribuit la rezolvarea rapidă a problemelor.
Aceste tendințe sunt bine ilustrate de evoluția sistemelor de control pentru nave spațiale și nave. Astfel, în 1957, Sputnik 1 a intrat pe orbită fără niciun control și, deja în 1960, a fost fabricat și lansat un AMS cu un computer multifuncțional de bord. În același timp, s-au format ideile și conceptele principale care sunt încă folosite în astronautică - dar la nivel tehnic modern.
informații