Andronaut va apărea pe ISS

Oamenii de știință ruși își termină munca de creare a primului intern СЂРѕР ± отР°-asistent pentru munca la Stația Spațială Internațională.
Sistemul robotic antropomorf „Andronaut” a fost prezentat în cadrul celei de-a XI-a Conferințe științifice și practice internaționale „Zboruri cu echipaj cu echipaj în spațiu”, care s-a deschis pe 10 noiembrie la Centrul de pregătire pentru cosmonauți care poartă numele. Yu.A. Gagarin în Star City.

Robotul a fost numit „Andronaut”. Înălțimea lui este de 1 m 90 cm, are umeri lați - un bărbat frumos ("Bărbat"! Feministe deja geme). Particularitatea sa este că este antropomorfă, adică, în structura sa, seamănă cu o persoană. Și acesta este marele său avantaj.

Dezvoltatori: specialiști de la Centrul de pregătire pentru cosmonauți Gagarin și institutul industrial al Întreprinderii Unitare de Stat Federal TsNIIMash, precum și cosmonauți Roscosmos.
„Apariția unui asistent robot pe ISS, pe de o parte, va ușura sarcina de lucru a astronautului și, pe de altă parte, poate complica sistemul, deoarece un nou participant va apărea între „mediul profesional” și astronaut - robotul asistent. Prin urmare, cercetarea ergonomică suplimentară este foarte importantă și necesară în acest domeniu, ceea ce ne va permite să dobândim cunoștințe suplimentare în domeniul studierii sistemului de interacțiune robot-om.”, - a spus managerul de proiect de la Centrul de Formare, șef adjunct al Departamentului Științific al Centrului de Formare, Igor Sokhin.

„Andronaut” aparține ultimei categorii de sisteme robotizate; poate fi controlat de la distanță de către un operator. De exemplu, un membru al echipajului dintr-un compartiment etanș pe o bază lunară, purtând un costum special (exoschelet), va putea controla un robot situat la mare distanță pe suprafața Lunii.
Robotul va efectua lucrări mecanice, repetitive, atunci când efectuează experimente, de exemplu, înmânând instrumente astronautului.
Robotul poate fi controlat și de la sol de către un operator al Centrului de Control al Misiunii. În modul automat, robotul asistent trebuie să ofere asistență echipajului în timpul diferitelor operațiuni de zbor, de exemplu, să ofere astronautului instrumentele necesare. „Andronaut”, echipat cu o interfață multimodală, este, de asemenea, capabil să ofere suport informațional: operatorul poate pune o întrebare și poate primi un răspuns prin mesaj vocal sau poate citi text multimedia pe o tabletă. Pe lângă „sfaturi” informaționale, este luată în considerare problema acordării „Andronautului” cu sprijin psihologic membrilor echipajului.
Acum ISS este folosită ca platformă experimentală, cele mai noi tehnologii, în special robotica, sunt testate.

De exemplu, complexul robotic canadian „Canadarm” instalat pe ISS „funcționează” pentru a transfera structuri mari.

„Cargo boom” (GSt) este o macara de marfă pentru deplasarea mărfurilor și a astronauților de-a lungul suprafeței exterioare a stației. Folosit pe stația sovietică/rusă Mir și folosit în segmentul rus al ISS.
Două atingeri. Ambele au fost instalate pe modulul Pirs. Primul a fost livrat în timpul zborului STS-96, al doilea - STS-101. Apoi, din cauza sfârșitului iminent al duratei de viață Pirs, macaralele au fost mutate la suprafața modulelor Poisk și Zarya (în 2012).

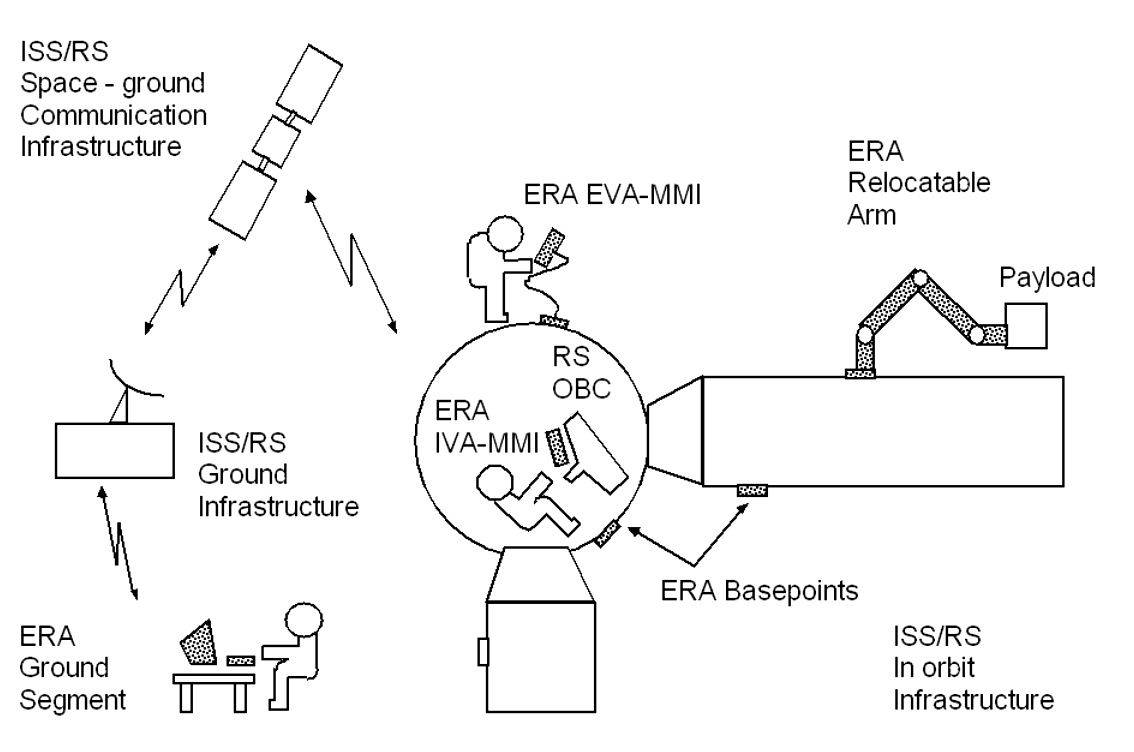
Manipulatorul european ERA a achiziționat o nouă locație - modulul de laborator multifuncțional „Știință”, creat de Centrul Spațial de Cercetare și Producție de Stat Hrunichev pe baza modulului de rezervă FGB-2. Acesta va adăposti punctele de atașare de bază și dispozitivul de control al manipulatorului.
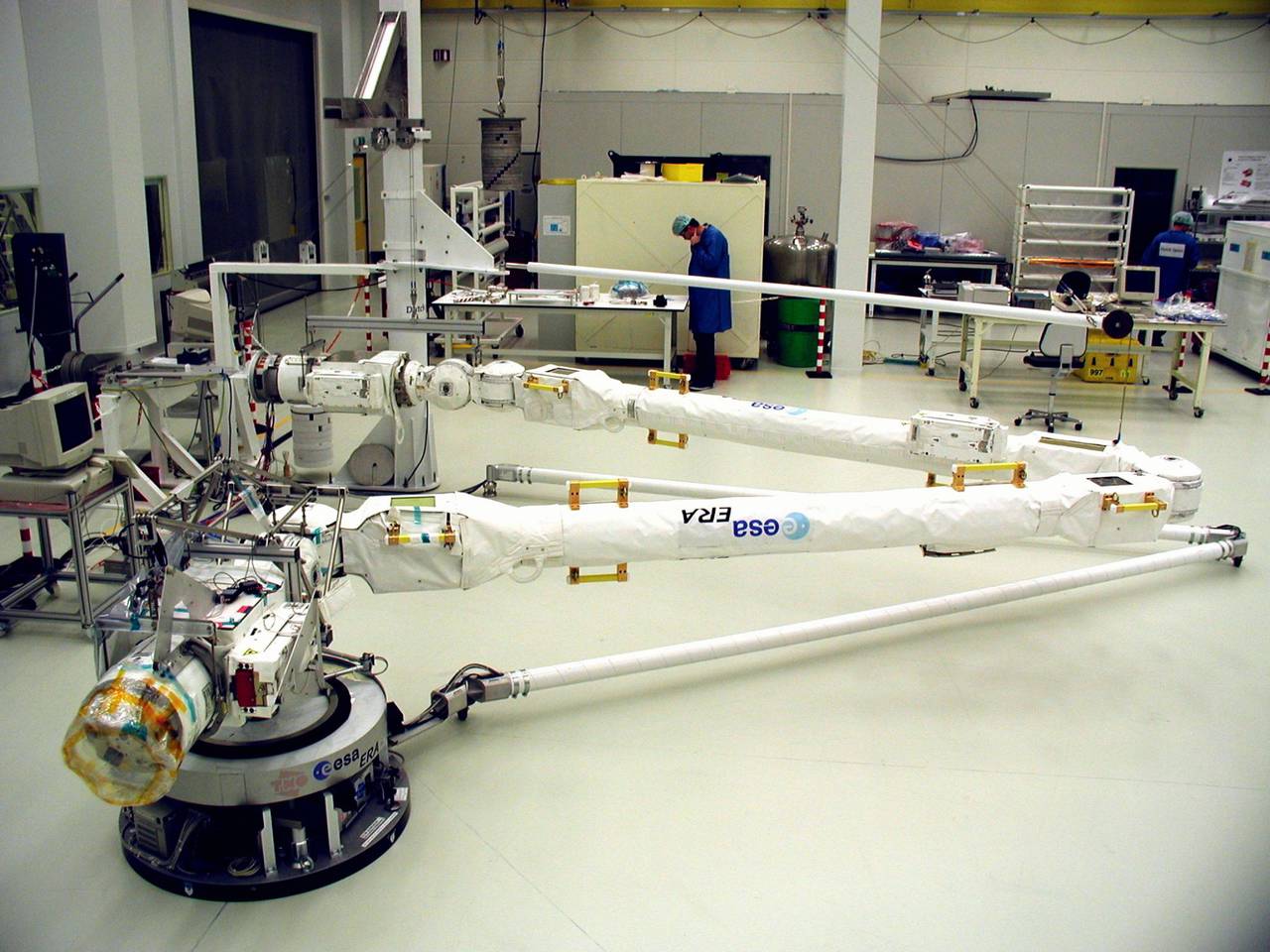
Păcat că se află încă pe Pământ (din cauza dezastrului Columbia, planurile s-au schimbat).
Robonaut 2 este un robot umanoid dezvoltat de NASA și General Motors. Este o figură umanoidă fără picioare, al cărei cap este vopsit în aur, iar trunchiul este alb. Mâinile robonautului au cinci degete cu articulații asemănătoare cu cele ale oamenilor. Aparatul poate scrie, apuca și plia obiecte și poate ține lucruri grele, de exemplu, o gantere care cântărește 9 kg. Robotul nu are încă jumătatea inferioară a corpului său. În casca R2 sunt încorporate patru camere video, datorită cărora robotul nu numai că navighează în spațiu, ci și transmite semnale de la ele către monitoarele dispecerilor. Există și o cameră cu infraroșu în cască. Numărul total de senzori este mai mare de 350. Gâtul robotului are trei grade de libertate, iar fiecare braț, a cărui întindere este de 244 cm, are șapte. Periile dispozitivului au 12 grade de libertate. Fiecare deget poate rezista la sarcini de până la 2,3 kg. În „burta” robotului se află un centru de calcul, care include 38 de procesoare PowerPC. Din punct de vedere structural, robotul este realizat în principal din aluminiu și oțel. Robonaut 2 cântărește 150 kg și are 1 m înălțime. Pe spatele robotului se pune un rucsac cu sistem energetic.
Robonaut 2 a plecat spre ISS pe 24 februarie 2011 la bordul navetei STS-133 Discovery și va funcționa la stație în mod permanent.
Scopul lansării robotului este de a testa funcționarea acestuia în condiții de imponderabilitate, de a studia influența radiațiilor cosmice și electromagnetice asupra funcționării acestuia.
Pe 14 aprilie 2014, Agenția Spațială Americană (NASA) ar trebui să trimită picioare pentru un Robonaut. Interesant este că după ce picioarele sunt conectate la robotul umanoid, înălțimea totală a acestuia va fi de 2,7 metri. Fiecare picior de robot are șapte articulații.

Dar până acum, din câte știu, acest lucru (livrarea extremităților inferioare) nu s-a întâmplat.
Putin din povestiri roboți spațiali domestici
Lyappa este un manipulator mecanic mare folosit în timpul asamblarii stației orbitale sovietice Mir. Manipulatorul a fost atașat direct la modulele stației în curs de asamblare. Fiecare dintre modulele Kvant-2, Kristall, Spectrum și Priroda a fost echipat cu o copie a bug-ului.

Manipulatorul a fost folosit și pentru a schimba poziția modulelor stației, permițându-le să fie rotite cu 90°.
SAR-401 de la NPO „Tehnologia Android”.


Principiul controlului avatarului: repetă mișcările unui operator uman îmbrăcat într-un costum special (în cazul SAR-401 se folosește un dispozitiv master tip copiere UKT-3).
Din 2013, au fost testate diverse scenarii de control în condiții terestre: de la bordul ISS și un scenariu de urgență de control al robotului de pe Pământ. Este păcat, dar aceasta nu este încă o opțiune viabilă.
Videoclip pe tema: Top 5 roboți umanoizi din 2015.
Materiale folosite, fotografii și videoclipuri:
http://robotrends.ru
http://chrdk.ru
http://trinixy.ru
http://www.gctc.ru/
http://v-kurse.ru/
www.youtube.com
en.wikipedia.org
ru.wikipedia.org
http://robonaut.jsc.nasa.gov/mobility
informații